Comment financer son permis moto ?
 par
par Le permis moto, bien plus qu’un simple sésame pour les adeptes de deux-roues, représente une aventure éducative dont le financement peut souvent sembler complexe. Heureusement, …
Le permis moto, bien plus qu’un simple sésame pour les adeptes de deux-roues, représente une aventure éducative dont le financement peut souvent sembler complexe. Heureusement, …
La Peugeot 208 est l’un des modèles phares du constructeur français, reconnue pour sa polyvalence, son design élégant et ses performances sur la route. Si …
Les voitures Tesla sont reconnues pour leur design élégant, leur performance exceptionnelle et surtout pour leur caractère respectueux de l’environnement. Ces véhicules électriques ont su …
Acheter une voiture aux enchères peut être une option intéressante et économique pour qui cherche à acquérir un véhicule d’occasion. Toutefois, cette méthode d’achat présente …
Lorsqu’il est temps de changer de véhicule, plusieurs personnes se posent la question des options de financement disponibles pour acheter une voiture neuve. C’est pourquoi …
L’essor des voitures électriques offre une alternative écologique et économique à la conduite traditionnelle. Toutefois, l’investissement initial peut sembler conséquent. Avec des choix judicieux et …
En matière d’achat de véhicule, la solution des voitures d’occasion s’avère attrayante pour nombre de foyers. Néanmoins, il est important de bien comprendre tout ce …
Dans le monde dynamique de la conduite VTC (Véhicule de Transport avec Chauffeur), la perspective de travailler sans une plateforme d’application dédiée est en effet …
Dans un pays en constante évolution comme le Luxembourg, la location de container est devenue une solution privilégiée pour les particuliers et les professionnels désireux …
Les radars pédagogiques sont de plus en plus présents sur nos routes. Ils permettent d’informer les automobilistes sur leur vitesse, et ainsi les encourager à …
Dans un contexte où les problématiques environnementales sont devenues incontournables, le secteur du transport maritime et portuaire français s’engage dans une démarche de décarbonation. Cette …
Si vous possédez une voiture équipée d’un turbo et que celui-ci vient de rendre l’âme, plusieurs questions peuvent se poser. Notamment, si votre véhicule est …
Changer un rétroviseur de voiture peut sembler être une tâche complexe, mais avec les outils adéquats et quelques astuces, vous pouvez réaliser cette opération en …
Opter pour un 4×4 est un choix qui doit être bien réfléchi, car il existe une grande variété de modèles. En effet, ils sont tous des …
La vanne EGR est une pièce automobile qui permet de réduire les émissions de gaz polluant qu’elle laisse s’échapper. Ce clapet s’ouvre et se referme …
Partir en vacances est toujours un moment excitant. Cependant, pour que le voyage se passe dans les meilleures conditions possibles, il est essentiel de bien …
Le secteur du transport et de la logistique est historiquement porteur d’activités centrales dans l’économie française. Il a su conserver sa place de premier plan …
La carte grise ou certificat d’immatriculation est un document qui permet d’identifier votre véhicule. En effet, elle fait un récapitulatif de toutes ces caractéristiques. De …
C’est un système de transport de vélo qui se positionne sur la boule d’attelage de votre voiture. Il vous permet de transporter un ou plusieurs …
Une voiture TPMR est un véhicule qui permet de transporter des personnes à mobilité réduite. Il est adapté à toutes les personnes qui se déplacent …
La niveleuse est essentielle pour tout projet de construction ou d’excavation. Que vous cherchiez à déplacer de la terre, à creuser des tranchées ou d’autres …
La navigation de plaisance est une véritable passion pour de nombreuses personnes. Entre location et achat, les amateurs de bateaux n’hésitent pas à dépenser des …
Vous avez des problèmes de santé, mais vous ne pouvez pas vous déplacer pour consulter un médecin ou vous faire hospitaliser ? Ne cherchez pas …
En agriculture, avoir des équipements de haute qualité est une condition essentielle pour une meilleure performance. Quel que soit le type de culture effectuée, il …
Depuis 2006, un véhicule de plus de 3,5 t doit être équipé d’un tachygraphe. Cet appareil relève les temps de conduite et de repos, la …
La voiture est considérée comme un moyen de transport pratique, mais aussi une véritable pièce de collection. Cependant, face aux effets du temps et les …
Décrocher votre permis n’est pas la seule condition à remplir pour être en mesure de conduire votre voiture en toute légalité. Vous ne pouvez en …
Le bioéthanol devient le choix numéro un des automobilistes du monde entier, en raison de son prix inférieur à la pompe, grâce aux avantages fiscaux, …
L’entretien de votre moto est important si vous voulez qu’elle fonctionne bien et si vous voulez en tirer le meilleur parti. Vous connaissez sûrement déjà …
Une question cruciale revient souvent au moment de la vente d’un bateau : ‘’quelle est sa valeur ? ’’. En effet, dans le cadre de …
Avec l’inflation, de plus en plus de Français sont désormais à la recherche de solutions économiques pour leurs voitures. La pénurie des matières premières, provoquant …
Si vous envisagez de vendre votre voiture, vous souhaitez sûrement connaître sa cote. Évidemment, c’est l’option idéale pour avoir une estimation du prix de vente …
Selon Santé Publique France, dans sa dernière étude concernant la qualité de l’air ambiant, les particules fines sont responsables de 40 000 décès par an …
Un véhicule d’occasion est un véhicule mis en vente après une certaine durée d’utilisation. L’achat d’une voiture d’occasion présente principalement l’avantage d’obtenir un excellent rapport …
Après l’annulation du Salon de l’auto de Genève, celui de Lyon se déroulera début avril. Il s’annonce comme le premier grand rendez-vous en Europe sur …
Avoir un véhicule peut être une nécessité, en particulier si vous vivez à la campagne. Toutefois, au lieu d’en acheter, beaucoup de personnes préfèrent désormais …
Les moments passés ensemble en famille sont indispensables pour renforcer les liens au quotidien. Qu’il s’agisse de sorties, de voyages ou autres, la voiture reste …
Alors que le pays est en pleine période d’élection présidentielle, le communiste Fabien Roussel déclare souhaiter mettre en place, pour les moins de 25 ans, …
Hybride, thermique ou électrique ? Voiture neuve ou d’occasion ? Il n’est jamais évident de se lancer dans l’achat d’une nouvelle voiture. Le pays étant …
Acheter une voiture d’occasion n’est pas toujours évident. En fonction de votre budget, de l’utilisation prévue et tout simplement de vos envies, certaines voitures sont …
Il est important d’adapter ses pneus en fonction de la saison. Pneus été, hiver, clouté ou 4 saisons, tous n’ont pas les mêmes fonctionnalités et …
Chaque année, des centaines de millions de colis parcourent la France. Entre le succès des plateformes e-commerce et les fêtes de Noël, la livraison devient …
Depuis mai 2020, les ventes de voitures d’occasion ont considérablement augmenté. En effet, les sites de vente entre particuliers ont enregistré une hausse de 18 …
Le système antipollution s’est implémenté dans l’industrie de l’automobile dans les dernières années. Ce dispositif s’est réfléchi en réponse à la crise climatique et à …
La question écologique agite les gouvernements et les mairies. Au-delà du secteur du bâtiment, premier en terme de pollution, les transports sont une forte source …
Le 17 décembre 2020, un amendement, visant une nouvelle taxe automobile, a été adopté par l’Assemblée nationale. Le but : mettre en place un malus …
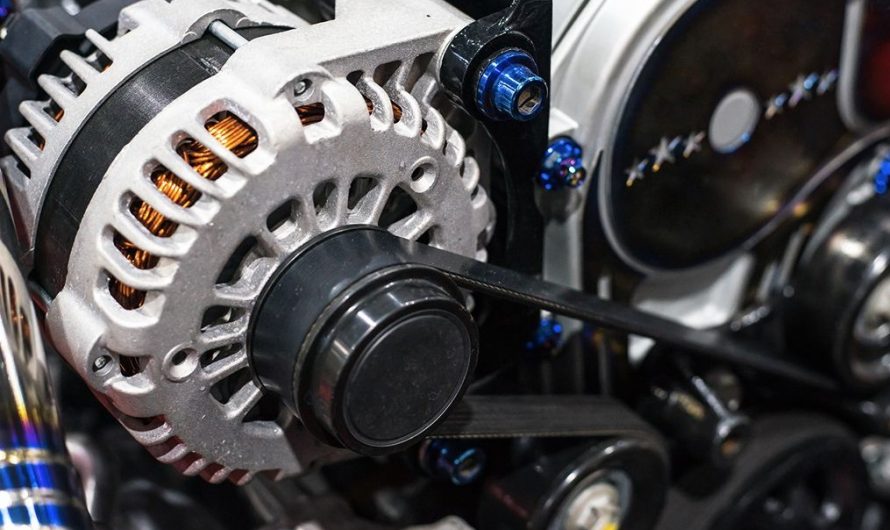
Si l’on entend souvent parler de la courroie de distribution, on lit plus rarement des informations concernant la courroie d’accessoire. Véritable machinerie permettant de relier …
Les métiers dans le domaine du transport ont une place importante de nos jours. En effet, avec une ère du numérique déjà bien avancée, les services …
La voiture électrique continue de gagner du terrain. Les bornes de rechargement présentes un peu partout en ville facilitent la vie des citadins. Par ailleurs, …
Avez-vous déjà entendu parler du combiné fileté ? À la première lecture, on a l’impression de découvrir un article sur les vieux téléphones, mais ça, …
Sa voiture peu importe sa taille et sa puissance, on y tient ! Alors quand on perd les clés de son écrou antivol et qu’on …
François Gabart est en train d’assembler au sein de ses locaux le M101, un bateau trimaran de près de 31 mètres destiné à naviguer entre …
En 2020, on ne lit plus les panneaux, on se fait guider par son téléphone. Les conducteurs de moto, de voiture, de vélo ou les …
C’est désormais le constructeur Shelby SuperCars (SSC) qui détient le record de la voiture la plus rapide du monde avec sa Supercar Tuatara.
On rêve tous d’avoir un bateau. Durant une balade dans un port, on s’imagine sur le plus grand yacht ou dans cette barque « trop mignonne ». …
La sécurité c’est primordial. Connaître le code de la route et savoir conduire une moto ou un scooter, ça ne suffit pas. Il faut aussi …
Si vous avez une voiture, vous avez forcément une plaque d’immatriculation, dite aussi « plaque minéralogique », c’est une obligation légale pour pouvoir circuler sur la voie …
Certaines personnes perdent leurs clés, leur téléphone, leur porte-monnaie, d’autres, leur code d’autoradio Renault. Au premier abord, on a envie de prendre cette perte à …
Une batterie de voiture, c’est très important. Elle sert à stocker l’énergie produite par l’alternateur puis de la restituer. Elle permet de lancer le moteur …
Pour réussir son code de la route, la préparation aux épreuves est indispensable. Une fois ce fameux sésame dans la poche, il ne restera plus …
Vivre au bord de la mer ou aller en vacances en bord de mer, quel bonheur. Alterner entre une journée à bronzer à la plage …
Vous avez sûrement déjà pris l’avion et ressenti ces secousses étranges par moment qui ne mettent vraiment pas en confiance. À peine on sent les …
Skyscanner est une filière du groupe CTRIP qui permet de comparer les prix des différents vols. Ce comparateur de transports en ligne propose un service …

 par
par 





 par
par 
 par
par